Mange mennesker anser en robot som en maskine, der kan køre selvstændigt. Men hvis du udvide definitionen af "robot" lidt, kan fjernbetjente objekter anses for at være en robot. Du tror måske, at opbygge en fjernstyret robot er hård, men i virkeligheden er det nemt, hvis du ved hvordan. Denne artikel vil forklare, hvordan man opbygger en fjernstyret robot.
Steps
- 1Erkende, hvad vil du bygge det første skridt i opbygningen af en fjernstyret robot er at erkende, at du ikke vil være i stand til at opbygge en fuld størrelse, tobenede, menneskelignende robot, der kan gøre alle dine gøremål. Eller vil du bygge en robot med flere kløer, der kan nå ud og hente 100 £ vægte. Du bliver nødt til at begynde at opbygge en robot, der vil være i stand til at gå frem, tilbage, til venstre og til højre fra dig styre det trådløst. Men når du får det grundlæggende ned og få denne enkle robot bygget, kan du normalt tilføje og ændre ting på den. Du bør normalt gå ud fra princippet, at ingen robot nogensinde er færdig. Det kan altid ændres og gøres bedre.
- 2Planlæg din robot Før opbygge din robot, selv før bestilling af reservedele. Du er nødt til at designe din robot. Til din første robot, du skal gå med et enkelt design for kun to servomotorer på et fladt stykke plastik. Dette design er virkelig simpelt og efterlader som regel ekstra plads til at tilføje ekstra ting efter den er bygget. Planer om at bygge noget omkring 15 cm. med 20 cm. For en robot denne enkle, skal du være i stand til bare trække det ud på papir ved hjælp af en lineal. Tegn det samme størrelse på papir som det skal være i det virkelige liv, da robotten er så lille. Når du kommer ind i større, mere komplekse robotter, bør du begynde at lære at bruge CAD eller et program svarende til det, såsom Google Sketchup.
- 3Vælg dine dele det er stadig ikke tid til at bestille reservedele. Men du skal vælge dem nu og vide, hvor man kan købe dem. Prøv at bestille fra så få steder som muligt, og du nogle gange kan spare penge på forsendelse. Du skal bruge et materiale til chassiset, to "servo" motorer, et batteri, en sender, en sender og en modtager.
- Valg af en servomotor at flytte robotten, du bliver nødt til at bruge motorer. En motor viljestyrke ét hjul og en for den anden. Denne måde kan du bruge den enkleste styring metode, differential-drev. Dette betyder at gå fremad begge motorer tur fremad, for at gå baglæns begge motorer baglæns og til at dreje en motor går og én motor forbliver stadig. En servomotor er anderledes end en grundlæggende jævnstrømsmotor fordi en servomotor er gearet, kan kun dreje 180 grader, og kan overføre data tilbage på det holdning. Dette projekt vil bruge servomotorer, fordi det er lettere, og du behøver ikke at købe et dyrt "speed controller" eller en separat gearkasse. Når du forstår, hvordan man opbygger en fjernstyret robot, kan du ønsker at gøre en anden en (eller ændre den første) til at bruge DC motorer, snarere end servomotorer. Der er fire grundlæggende ting, du skal bekymre dig om, når de køber servomotorer. Disse er hastighed, drejningsmoment, størrelse / vægt, og hvis de er 360 Modificerbare. Da servomotorer kun slå 180 grader, vil din robot kun kunne gå fremad en lille smule. Hvis motoren er 360 graders modificerbare, kan du ændre det til at spinde kontinuerligt. Sørg for, at motoren er 360 graders modificerbare. Størrelse / vægt er ikke meget vigtigt i dette projekt, fordi du sandsynligvis vil have masser af plads tilovers alligevel. Prøv at få noget gennemsnitlige størrelse. Moment er motorerne styrke. Disse er, hvad gear bruges til. Hvis der ikke er gear og momentet er lav, er det sandsynligvis ikke vil gøre det muligt for robotten at bevæge sig fremad, fordi det ikke har den styrke. Du ønsker en høj drejningsmoment, men jo højere drejningsmoment, generelt lavere hastighed. Til denne robot, forsøge at få en god balance mellem hastighed og drejningsmoment. Du kan altid købe og vedlægge en mere kraftfuld eller hurtigere servo når du er færdig bygning. Det anbefales at få HiTec HS-311 servo for første RC robot. Denne servo har en god balance af hastighed og drejningsmoment, er billig, og er en god størrelse for denne robot. Hitec HS-311 servo kan købes
- Da servo normalt kun kan dreje 180 grader, du nødt til at ændre det, så det har en kontinuerlig rotation. Ændring af en servo, bortfalder garantien, men det skal gøres. For detaljerede instruktioner om, hvordan du ændrer en servo go
- Vælg et Batteri Du bliver nødt til at få noget at magten din robot. Forsøg ikke at bruge AC (dvs. stik det ind i væggen) magt. Du skal bruge DC (dvs. batterier) magt.
- Vælg et batteri Type * Der er 3 vigtigste typer af batterier, vi vil vælge fra. Disse er Lithium Polymer (LiPo), NiMH, NiCad, og alkaline.
- Lipo batterier er de nyeste batterier, som du kan få, og er ekstremt let. Men de er farlige, dyre og kræver en særlig oplader. Brug kun denne type batteri, hvis du har erfaring med robotter og er villige til at bruge flere penge på din robot.
- NiCad-batterier er almindelige genopladelige batterier. Disse bruges i en masse af robotter. Det største problem med disse batterier er, hvis du oplade dem, når de ikke er fuldt døde, vil de ikke vare så længe på en fuld opladning.
- NiMH-batterier er meget lig NiCad-batterier i størrelse, vægt og pris, men har bedre samlede præstation og det er disse batterier normalt anbefales for en nybegynder projekt.
- Alkaline-batterier er de fælles batterier, der ikke genopladelige. Disse batterier er almindelige (Du har sikkert nogle), billig og let at få. Men de dør hurtigt, og du er nødt til at købe dem igen og igen. Må ikke bruge disse.
- Vælg Batterispecifikationer du skal vælge en spænding til din batteripakke. Den mest almindelige i robotter er 4.8V og 6.0V. De fleste servoer vil være fint kører på nogen af dem. Det anbefales normalt at gå med 6.0V (hvis dine servoer kan håndtere det, som de fleste kan), fordi det vil tillade dig at have din servomotor gå hurtigere og have mere magt. Nu er du nødt til at beskæftige med kapacitet på din robot batteripakke. Disse er mærket som mah. Jo højere du gå bedre, men dyrere og normalt tungere. For størrelsen af robotten, du er ved at opbygge, er det anbefale om 1800 mAh. Hvis du nødt til at vælge mellem en 1450 mAh batteri eller en 2000 mAh batteri med samme spænding og vægt gå med 2000 mAh. Det vil være dyrere med et par dollars, men er en alt omkring bedre batteritid at få. Vær sikker på at du får en oplader til at oplade batteriet med. En 6.0V 2000mAh NiMH batteripakke kan købes
- Vælg et batteri Type * Der er 3 vigtigste typer af batterier, vi vil vælge fra. Disse er Lithium Polymer (LiPo), NiMH, NiCad, og alkaline.
- Vælg et materiale til din robot En robot har brug for en karrosseri for at montere alle elektronik til. De fleste robotter denne størrelse er lavet af plastik eller aluminium. For en nybegynder, er det anbefalet at bruge en type plastik kaldes HDPE. Denne plast er nem at arbejde med og billigt. Når det afgøres, tykkelse at få, få omkring 1/4 "tyk. Når det besluttes, hvor stor af et ark til at få, bør du nok få en temmelig stor ark, hvis du rodet op på skæring. Det er normalt anbefales at få mindst dobbelt størrelsen på din robot. Men du burde nok få mere. A 1/4 "24" X24 "stykke HDPE kan købes
- Vælg en sender / modtager Dette vil være den dyreste del af din robot. Det kan også betragtes som den vigtigste, for uden det, kan robotten ikke gøre noget. Det anbefales at købe en god sender / modtager til at starte med, fordi det er den ting, der vil være grænsen for, hvor meget du kan sætte på. En billig sender / modtager vil flytte din robot fint, men du vil ikke være i stand til at tilføje noget til det. Desuden kan senderen bruges andre robotter, som du kan bygge i fremtiden. Så i stedet for at købe en billig en nu og en dyrere en senere køber bare bedre nu. Det vil spare dig penge i det lange løb. Anyway, der er et par frekvenser, som du kan bruge. De mest almindelige er 27MHz, 72MHz, 75MHz og 2.4Ghz. 27MHz kan anvendes til fly og biler. Det er mest almindeligt anvendt i billige fjernstyrede legetøj. 27MHz anbefales ikke til noget, undtagen små projekter. 72MHz kan kun anvendes til fly. Da 72MHz normalt bruges i store modelfly, er det ulovligt at bruge i overfladen køretøjer. Hvis du bruger 72MHz, ikke kun du bryder loven, men du kan blande med en stor, dyr model flyvemaskine i nærheden. Dette kan få det til at bryde sammen og kan koste en masse penge til at reparere, eller endnu værre nedbrud i en person og såre eller endog dræbe dem. 75MHz er lavet for kun overflade brug, så du kan bruge denne ene. Imidlertid 2.4Ghz er bedst. Det har mindre interferens end nogen af de andre frekvenser. Det anbefales at bruge de ekstra par dollars og få en 2.4Ghz sender og modtager. Når du har besluttet på, hvad frekvens du vil bruge, er du nødt til at beslutte, hvor mange "kanaler" du vil komme på sender / modtager. Kanaler er temmelig meget, hvor mange ting du kan styre på din robot. Til denne robot, du får brug for mindst to. Én kanal vil lade din robot gå fremad / bagud og man vil gøre det muligt at gå til venstre / højre. Dog er det anbefales at få mindst 3. Dette er fordi, når du har bygget robotten, kan du ønsker at tilføje endnu en ting til det. Hvis du får 4, du normalt har to joystick. Med en fire kanals sender / modtager, kan du være i stand til sidst tilføje en klo. Som sagt før, bør du få det bedste sender / modtager dit budget tillader nu, så du ikke behøver at købe et bedre senere. Du kan bruge din sender og endda din receiver igen på andre robotter, du kan bygge. Den Spektrum DX5e 5-Channel 2.4Ghz Radio System Mode 2 og AR500 kan købes sammen
- Vælg Hjul Når du vælger hjul, de tre vigtigste ting, du skal bekymre dig om, er diameter, trækkraft, og hvis de vil knytte til dine motorer nemt. Diameter er længden af hjulet fra den ene side, gennem midtpunktet, til den anden side. Jo større diameteren af hjulet, jo hurtigere det går, og jo mere kan klatre, men mindre moment det vil have. Hvis du har et mindre hjul, kan det ikke være i stand til at klatre meget let eller gå meget hurtigt, men det vil have mere magt. Traction er, hvor godt hjulene fast på overfladen. Sørg for at du får hjulene med en gummi eller skum ring omkring dem, så de ikke bare skubbe rundt. De fleste hjul, der er lavet til at knytte til servoer, vil være i stand til at bare skrue ret på dem, så du ikke behøver at bekymre sig om, at så meget. Det anbefales at få et hjul et sted mellem 3 og 5 inches i diameter med en gummiring omkring dem. Du skal bruge 2 hjul. Precision disk hjul kan købes
- Valg af en servomotor at flytte robotten, du bliver nødt til at bruge motorer. En motor viljestyrke ét hjul og en for den anden. Denne måde kan du bruge den enkleste styring metode, differential-drev. Dette betyder at gå fremad begge motorer tur fremad, for at gå baglæns begge motorer baglæns og til at dreje en motor går og én motor forbliver stadig. En servomotor er anderledes end en grundlæggende jævnstrømsmotor fordi en servomotor er gearet, kan kun dreje 180 grader, og kan overføre data tilbage på det holdning. Dette projekt vil bruge servomotorer, fordi det er lettere, og du behøver ikke at købe et dyrt "speed controller" eller en separat gearkasse. Når du forstår, hvordan man opbygger en fjernstyret robot, kan du ønsker at gøre en anden en (eller ændre den første) til at bruge DC motorer, snarere end servomotorer. Der er fire grundlæggende ting, du skal bekymre dig om, når de køber servomotorer. Disse er hastighed, drejningsmoment, størrelse / vægt, og hvis de er 360 Modificerbare. Da servomotorer kun slå 180 grader, vil din robot kun kunne gå fremad en lille smule. Hvis motoren er 360 graders modificerbare, kan du ændre det til at spinde kontinuerligt. Sørg for, at motoren er 360 graders modificerbare. Størrelse / vægt er ikke meget vigtigt i dette projekt, fordi du sandsynligvis vil have masser af plads tilovers alligevel. Prøv at få noget gennemsnitlige størrelse. Moment er motorerne styrke. Disse er, hvad gear bruges til. Hvis der ikke er gear og momentet er lav, er det sandsynligvis ikke vil gøre det muligt for robotten at bevæge sig fremad, fordi det ikke har den styrke. Du ønsker en høj drejningsmoment, men jo højere drejningsmoment, generelt lavere hastighed. Til denne robot, forsøge at få en god balance mellem hastighed og drejningsmoment. Du kan altid købe og vedlægge en mere kraftfuld eller hurtigere servo når du er færdig bygning. Det anbefales at få HiTec HS-311 servo for første RC robot. Denne servo har en god balance af hastighed og drejningsmoment, er billig, og er en god størrelse for denne robot. Hitec HS-311 servo kan købes
- 4Bestil dine dele nu, at du har valgt dine dele, gå videre og bestille dem online. Prøv at bestille dem fra så få steder som muligt, fordi du måske være i stand til at spare penge på skibsfarten på den måde, hvis du bestille alt på samme tid.
- 5Måle og klippe dit chassis komme ud en lineal og en Sharpie og måle ud af længden og bredden af din chassis på det materiale, du bruger til din chassiset. Jeg anbefalede omkring 15 cm med ca 20 cm. Nu måle det igen, og sørg for dine linjer er ikke skævt, og er, hvor længe du vil have dem til at være. Husk, måler to gange, klippe én gang. Nu kan du klippe. Hvis du bruger HDPE, skal du være i stand til at skære det på samme måde, som du ville skære et stykke træ, der størrelse.
- 6Saml robotten nu, at du har alle dine materialer og du chassis cut, du bare nødt til at samle det hele sammen. Det kan faktisk være den letteste trin, hvis du har designet robot godt.
- Monter servomotorer på bunden af det stykke plastik nær fronten. De bør være sidelæns, således at akslen / horn (den del af servo der bevæger) står siderne. Sørg for at der er plads nok til at montere hjulene.
- Fastgør hjulene på servo hjælp af de skruer, der fulgte med servo.
- Sæt et stykke velcro på receiveren og en anden på batteripakken.
- Put to stykker af det modsatte velcro på robotten og holde din modtager og batteriet til det.
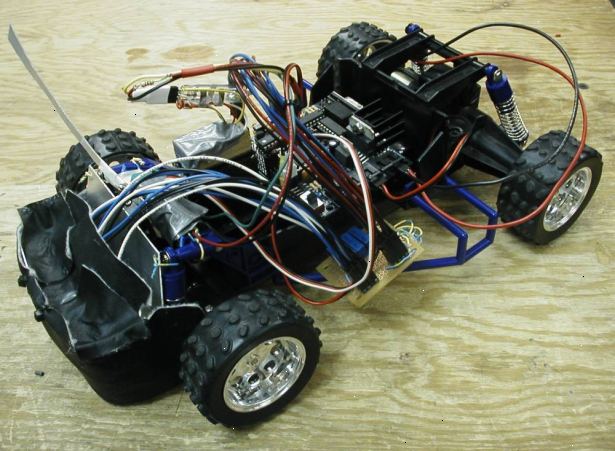
- Du skulle nu have en robot, der har to hjul i front og skråner ned mod ryggen. Der kommer ikke til at være en "tredje hjul" på denne robot, i stedet ryggen vil bare glide langs gulvet.
- 7Plug ledningerne i nu, at du har den samlede robot, bare du nødt til at sætte det hele i modtageren. Sæt batteriet i, hvor der står "batteri" på modtageren. Sørg for at du sætter det på den rigtige måde. Nu plug servoer i de første to kanaler på modtageren, hvor der står "kanal 1" og "kanal 2".
- 8Oplad det op tag batteriet fra modtageren og sætte det ind i opladeren. Vent, indtil batteriet er færdig med at oplade. Dette kan tage en fuld 24 timer, så vær tålmodig.
- 9Lege med det, du nu skal alle gjort. Gå fremad, gå fremad på senderen. Byg en forhindringsbane for det, lege med din kat. Nu, at du er færdig med at spille med den. Tilføj nogle ting til det!.
Tips
- Sørg for, at sender og modtager du køber, er den samme frekvens. Sørg også for, at modtageren har den samme eller mere mængden af kanaler, som senderen. Hvis der er flere kanaler på modtageren end senderen, vil kun det laveste beløb af kanaler være anvendelige.
- Tilføj stuff. Hvis du havde en ekstra kanal på din sender / modtager, kan du tilføje en anden servomotor til at gøre noget ekstra. Hvis du har en ekstra kanal, kan du prøve at lave en klo, der kan lukke. Hvis du har to ekstra kanaler, så prøv at lave en klo, der kan åbne / lukke og flytte til venstre og højre. Brug din fantasi.
- Du kan have til at købe en adapter, der lader dig sætte batteriet i opladeren.
- Hvis du trykker på højre og robotten går tilbage, prøv at skifte den indgang, du har sluttet servoer ind på modtageren. dvs Hvis du har tilsluttet den rigtige servo ind kanal 1 og til venstre ind kanal 2, skifte dem og sæt lige ind kanal 2, og venstre ind kanal 1.
Advarsler
- Begyndere bør ikke forsøge at bruge vekselstrøm (dvs. tilsluttet stikkontakten) for ethvert hjemmelavet projekt. Vekselstrøm er yderst farligt.
- Brug ikke frekvens 72MHz, medmindre du er ved at opbygge et fly. Hvis du bruger det på en overflade køretøj, ikke alene er det ulovligt, men du kunne såre eller endda dræbe nogen.
Ting du behøver
- Materiale til din Chassis: HDPE er omkring 15€ 0,00 for den størrelse, du burde få, og du vil have masser ekstra.
- To servomotorer: Hitec HS-311 servoer er omkring 10€ 0,00 hver.
- A Modtager: Modtageren af sender, som er monteret inde i helikopteren
- A Batteri: A 6.0V 2000mAh NiMH batteri er omkring 20€ 0,00.
- En batterioplader: En batterioplader er omkring 15€ 0,00.
- 2 Wheels: Precision Disk Hjul 5 inches i diameter er omkring 10€ 0,00 hver.
- Sticky Velcro